項目:某鑄鋼廠抓取搬運
工件輸送到傳送帶上→通過定位系統機械定位工件→定位系統的傳感器檢測到工件已到位→機器人收到指令移動并夾取工件→機器人移動將工件送到另一工位→完成整個過程→機器人回到初始位臵(等待下一個到位信號)。
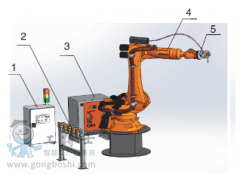
注:1.
KUKA 機器人 KR 210 R2700 extra
2. 三指液壓手爪(GBS)
3.
高溫工件(甲方供應)
4.
工件輸送、定位系統(GBS定制)
5.
機器人底座
6.
電氣控制柜
7.
機器人控制柜 KR C4
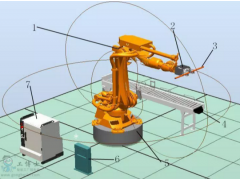
手爪采用模塊化方法進行設計,可作為獨立系統使用,滿足工作夾具在工作工位中的方便裝卸要求。系統具有碰撞、過流、過壓、欠壓、內部過熱、控制異常、伺服異常、急停機等故障的自診斷、報警和顯示功能。

 在線客服
在線客服 微信客服
微信客服


















 [VIP第3年] 指數:4
[VIP第3年] 指數:4 通過認證
通過認證