
 在線客服
在線客服 微信客服
微信客服



















 [VIP第6年] 指數(shù):6
[VIP第6年] 指數(shù):6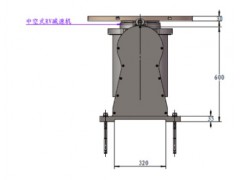




咨詢電話
021-80392549

|
店鋪基本資料信息
|
|||||||||||||||||||||||||||
川崎機器人KJ264壁掛機器人
防爆涂裝機器人
擁有φ70的大中空內(nèi)徑手腕,可在手臂上部搭載噴涂用機器,是一款線纜內(nèi)置、并具有寬廣動作范圍,可對應(yīng)大型工件的輕量防爆噴涂機器人。壁掛式規(guī)格。KJ264壁掛機器人概述:
負(fù)載手腕 15 kg, 手臂 25 kg應(yīng)用:涂裝
點擊下面的圖片來查看。圖中所示尺寸單位為毫米(mm)。

| KJ264壁掛的規(guī)格 | |||
| 手腕類型 | 3Rø70✽1 | ||
|---|---|---|---|
| 自由度(軸) | 6 | ||
| *大負(fù)載(kg) | 手腕:15 手臂:25 | ||
| *大伸展距離(mm)✽2 | 2,640 | ||
| 位置重復(fù)性(mm)✽3 | ±0.5 | ||
| 運動范圍(°) | 手臂旋轉(zhuǎn) (JT1) | +30 - -120✽4 | |
| 手臂前后 (JT2) | +130 - -80 | ||
| 手臂上下 (JT3) | +90 - -65 | ||
| 手腕旋轉(zhuǎn) (JT4) | ±720 | ||
| 手腕彎曲 (JT5) | ±720 | ||
| 手腕扭轉(zhuǎn) (JT6) | ±410 | ||
| 慣量(N•m) | 手腕旋轉(zhuǎn) (JT4) | 56.2 | |
| 手腕彎曲 (JT5) | 43.4 | ||
| 手腕扭轉(zhuǎn) (JT6) | 22.0 | ||
| 慣性力矩(kg•m2) | 手腕旋轉(zhuǎn) (JT4) | 2.19 | |
| 手腕彎曲 (JT5) |
1.31 |
||
| 手腕扭轉(zhuǎn) (JT6) | 0.33 | ||
| *大直線插補速度(m/s) | 1.5 | ||
| 質(zhì)量(kg) | 530 | ||
| 機身顏色 | 孟塞爾10GY9/1當(dāng)量 | ||
| 安裝 | 壁掛 | ||
| 防爆結(jié)構(gòu) | 歐洲・中國・韓國 | 內(nèi)壓防爆及本質(zhì)安全防爆的復(fù)合型(Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4) | |
| 環(huán)境條件 | 環(huán)境溫度(°C) | 0 - 40 | |
| 相對濕度(%) | 35 - 85(無結(jié)露) | ||
| 電源要量(kVA)✽5 | 5 | ||
| 控制柜 | 面向美國 | E35 | |
| 面向歐洲 |
E45 |
||
| 面向日本亞洲 | E25 | ||
✽1: 可以內(nèi)置線纜。
✽2: 6軸機器人的3R手腕構(gòu)造的時候,指的是JT1中心到JT4與JT5的回轉(zhuǎn)軸交點之間的距離。
✽3: 以ISO9283為基準(zhǔn)。
✽4: JT1動作范圍根據(jù)安裝面的方向不同有所區(qū)別。從機器人后方看,安裝面在左側(cè)的情況下,動作范圍為【+120~-30】,安裝面在右側(cè)的情況下動作范圍為【+30~-120】。
✽5: 因負(fù)載重量及動作而不同。
了解更多川崎機器人相關(guān)產(chǎn)品信息:http://www.kawasaki-jxs.gbsrobot.com絡(luò)安全監(jiān)察")


絡(luò)110報警服務(wù)")
